
Αθανάσιος Κανάτας
Καθηγητής
Tα UAV δίκτυα έχουν προταθεί ως συνιστώσα των ασύρματων δικτύων επόμενης γενιάς (beyond 5G).
Ερευνητές από το Τμήμα Ψηφιακών Συστημάτων προτείνουν για πρώτη φορά μία απλή και ρεαλιστική μαθηματική δομή για την τρισδιάστατη μοντελοποίηση ενός UAV δικτύου με πεπερασμένο αριθμό από κόμβους-UAVs. Η δομή βασίζεται σε εργαλεία στοχαστικής γεωμετρίας.
3D ΜΟΝΤΕΛΟΠΟΙΗΣΗ ΕΝΑΕΡΙΩΝ ΔΙΚΤΥΩΝ (Unmanned Aerial Vehicles – UAVs)
Tα UAV δίκτυα έχουν προταθεί ως συνιστώσα των ασύρματων δικτύων επόμενης γενιάς (beyond 5G) λόγω των μεγάλων πλεονεκτημάτων που προσφέρουν σε καταστάσεις έκτακτης ανάγκης, σε περιπτώσεις συγκεντρώσεων μεγάλης κλίμακας, ακόμη και σε στρατιωτικές εφαρμογές [1]. Η μοντελοποίηση τους όμως παραμένει ένα περίπλοκο ζήτημα. Πρόσφατα, η χρήση εργαλείων στοχαστικής γεωμετρίας έχει αποδειχθεί ικανή να μοντελοποιήσει εξαιρετικά περίπλοκες δομές επίγειων κυψελωτών δικτύων δύο διαστάσεων [2]. Δεδομένης της ανάγκης για τον χαρακτηρισμό των παρεμβολών σε ένα κυψελωτό δίκτυο, η στοχαστική γεωμετρία παρέχει την δυνατότητα απλοποίησης της αξιολόγησης της επίδοσης ενός τέτοιου δικτύου παρέχοντας συχνά διαφωτιστικά συμπεράσματα για τον σχεδιασμό τους.
Προτείνεται η 3D Binomial Point Process για τη μοντελοποίηση των UAV δικτύων.
Μέχρι τώρα, η δισδιάστατη στοχαστική διαδικασία Poisson (2D Poisson Point Process) χρησιμοποιείται ευρέως για την χωρική μοντελοποίηση των χρηστών μέσα στα υπάρχοντα κυψελωτά δίκτυα. Ωστόσο υπάρχουν δύο σημαντικά προβλήματα στην προσέγγιση αυτή. Αρχικά, η μοντελοποίηση στις δύο διαστάσεις δεν είναι επαρκής για ρεαλιστικά UAV δίκτυα. Πρόσφατα [3], ερευνητές από το Τμήμα Ψηφιακών Συστημάτων ανέδειξαν για πρώτη φορά την ανάγκη για μελέτη τρισδιάστατων UAV δικτύων. Συγκεκριμένα, αποδείχθηκε ότι τόσο σε πειραματικό όσο και σε αναλυτικό επίπεδο τα υπάρχοντα μοντέλα δύο διαστάσεων παρέχουν πιο αισιόδοξη επίδοση σε όρους κάλυψης έναντι των ρεαλιστικών τρισδιάστατων UAV δικτύων. Επιπλέον, ένα εναέριο δίκτυο δεν μπορεί να μοντελοποιηθεί με ακρίβεια με PPP καθώς διαφορετικές υλοποιήσεις της PPP αποτελούνται από διαφορετικό πλήθος χρηστών. Ωστόσο, στα ρεαλιστικά εναέρια τρισδιάστατα δίκτυα, το πλήθος των εναέριων κόμβων είναι πεπερασμένο. Για τέτοιες περιπτώσεις, μία απλή αλλά κατάλληλη επιλογή για την χωρική στοχαστική μοντελοποίηση των εναέριων κόμβων, αποτελεί η τρισδιάστατη διωνυμική στοχαστική διαδικασία (3D Binomial Point Process).
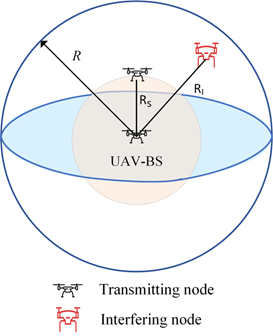
Στο πλαίσιο της μελέτης που πραγματοποιήθηκε, η 3D BPP χρησιμοποιείται για την χωρική μοντελοποίηση και την αξιολόγηση της επίδοσης ενός ρεαλιστικού UAV δικτύου, όπου ένας πεπερασμένος αριθμός από UAVs τοποθετείται μέσα σε μία σφαίρα. Ένας εναέριος σταθμός βάσης τοποθετείται στο κέντρο της σφαίρας και επικοινωνεί με τον κοντινότερο εναέριο χρήστη. Η ζεύξη υποφέρει από την παρουσία ενός ισχυρού παρεμβολέα. Το μοντέλο αυτό απεικονίζεται στο σχήμα. Το σύστημα αξιολογήθηκε ως προς διάφορες μετρικές επίδοσης παρέχοντας σημαντικά διαφωτιστικά συμπεράσματα για τον σχεδιασμό των UAV δικτύων.
Η εργασία αυτή εκπονήθηκε και δημοσιεύτηκε στο περιοδικό IEEE Access από τον Υποψήφιο Διδάκτορα του Τμήματος Ψηφιακών Συστημάτων κ. Χαράλαμπο Αρμενιάκο, υπό την επίβλεψη του Καθηγητή κ. Αθανάσιου Κανάτα, σε συνεργασία με τον Επίκουρο Καθηγητή του ΕΚΠΑ κ. Πέτρο Μπίθα.
Βιβλιογραφία:
[1] M. Mozaffari, W. Saad, M. Bennis, Y. Nam and M. Debbah, “A Tutorial on UAVs for Wireless Networks: Applications, Challenges, and Open Problems,” IEEE Commun. Surveys Tuts., vol. 21, no. 3, pp. 2334-2360, 2019.
[2] M. Haenggi, Stochastic Geometry for Wireless Networks. Cambridge, U.K.: Cambridge Univ. Press, 2012.
[3] C. K. Armeniakos, P. S. Bithas and A. G. Kanatas, “SIR Analysis in 3D UAV Networks: A Stochastic Geometry Approach,” in IEEE Access, doi:10.1109/ACCESS.2020.3036983.